Projet Robot Youpi
(projet commun S.I. <->ISN)
Partie ISN
A. INSTALLATION
1. Installer édupython (disponible dans le dossier ISN/Python sur le cloud).
2. Télécharger Phidget-x86_2.1.8.20131105.exe ou Phidget-x64_2.1.8.20131105.exe et installer (disponible dans le dossier ISN/Projets2014/SI sur le cloud).
3. Télécharger PhidgetsPython_2.1.8.20131105.zip (disponible dans le même dossier). Le décompresser sélectionner et copier le fichier setup.py et le dossier Phidgets. Aller dans le dossier C:\Program Files (x86)\EduPython\App et coller l’ensemble.
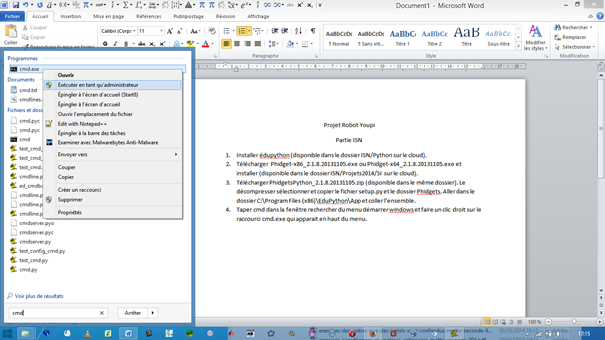
4. Taper cmd dans la fenêtre rechercher du menu démarrer windows et faire un clic droit sur le raccourci cmd.exe qui apparait en haut du menu. Choisir exécuter en tant qu’administrateur.
5. Dans l’interpréteur de commandes, aller dans le dossier d’edupython en tapant : cd C:\Program Files (x86)\EduPython\App
6. Puis lancer la commande python setup.py install .
C’est tout pour la partie installation. Pour vérifier le bon fonctionnement de l’ensemble, télécharger (toujours dans le dossier ISN/Projets2014/SI sur le cloud) Python_2.1.8.20140428.zip et le décompresser. Il contient un ensemble de programmes qui doivent maintenant s’exécuter sur votre ordinateur. Lancer édupython et ouvrir InterfaceKit-simple.py puis l’executer :
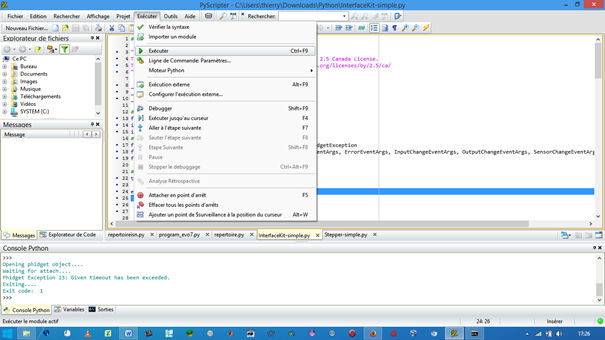
Il ne doit pas y avoir de message d’erreur.
B. PROGRAMMATION
On dispose maintenant d’un ordinateur programmable en python et capable de dialoguer avec l’interface Phidgets qui commande nos moteurs pas à pas.
Il faut donc maintenant écrire le programme qui va piloter les moteurs et donc le robot.
Une première étape va consister en l’écriture d’un programme commandant un moteur unique (et donc un mouvement unique, un seul axe).
On pourra par la suite composer les mouvements de plusieurs moteurs et faire travailler le robot sur plusieurs axes.
En partie finale, il faut que le robot « réagisse » en fonction d’informations données par des capteurs optiques et adapte son comportement pour accomplir la tâche qui lui incombe.
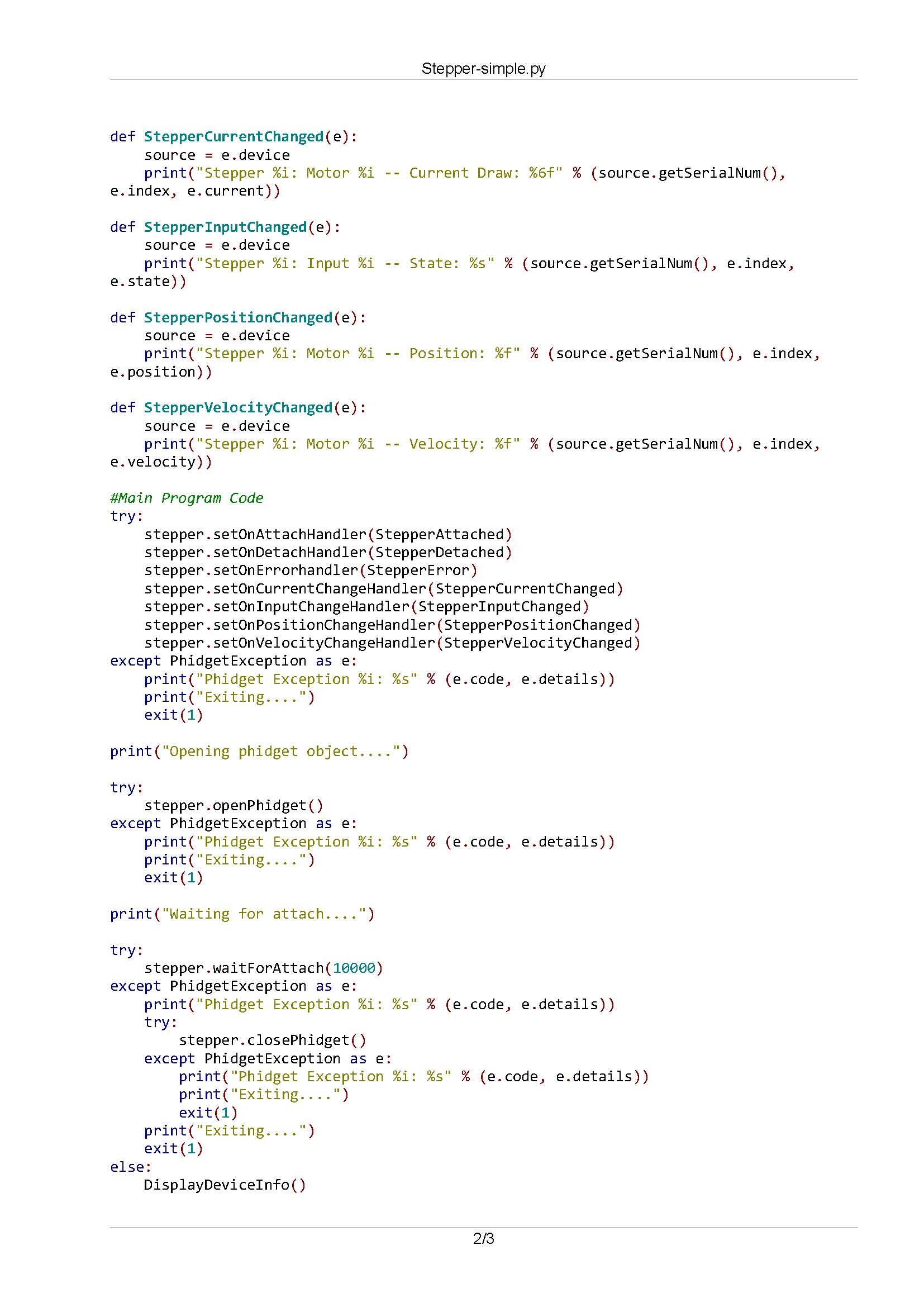
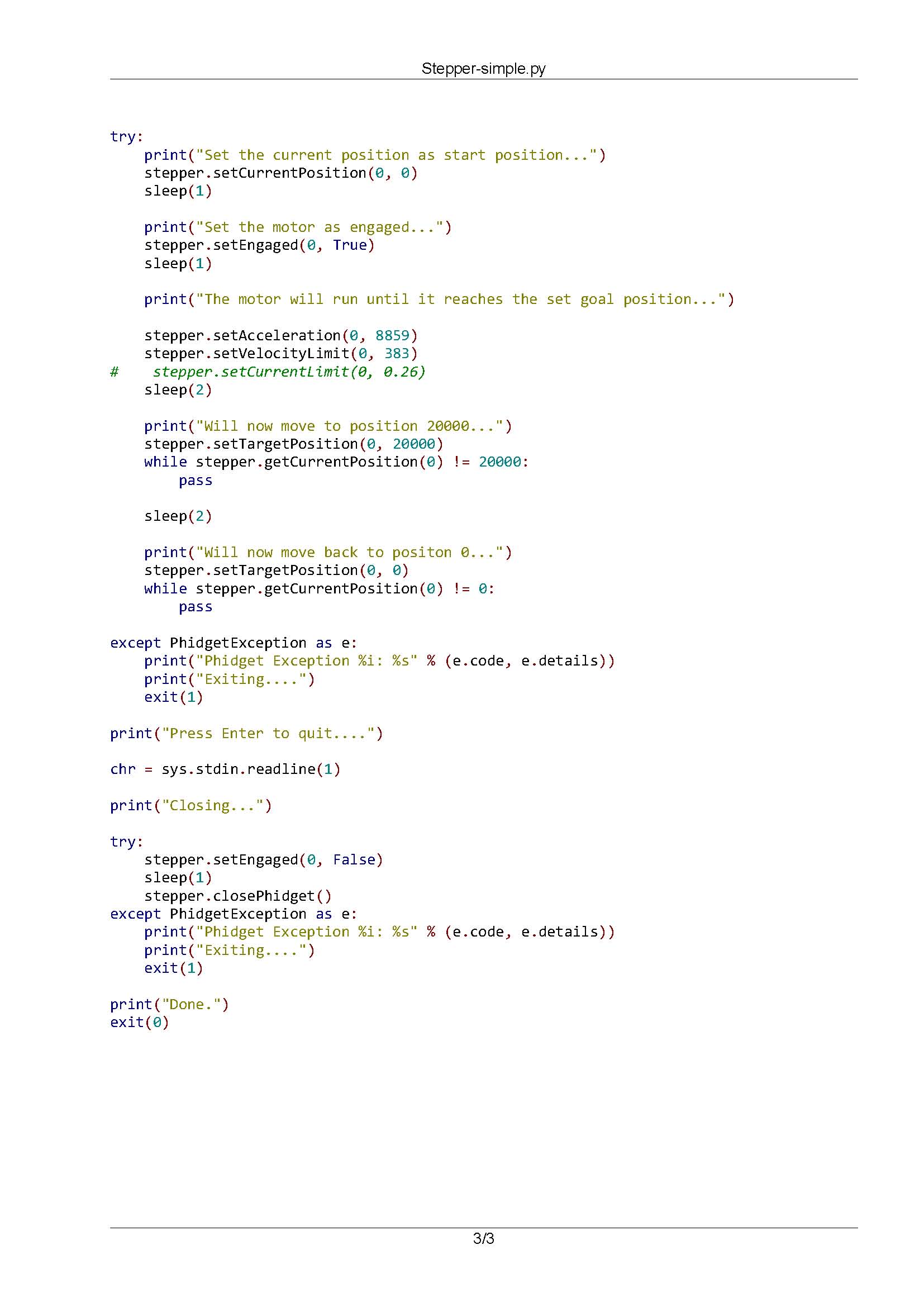
Pour cela télécharger les fichiers 8055.zip et Python_2.1.8.20140428.zip et les décompresser dans un même dossier. Ouvrir alors par exemple Stepper-simple.py avec edupyton et le lancer : normalement tout fonctionne. Il s’agit d’un programme de démonstration simple. Il faut ensuite le faire évoluer.
Le programme pystepper3.py peut constituer une base de développement. Attention, il a été écrit initialement pour python 2.5 et modifié pour python3. Il n’est pas fonctionnel dans l’état (il appelle une fonction globale k8055 non définie).
Voir les documentations ci-jointes :
· Language - Python - Phidgets Support
· OS - Windows - Phidgets Support
· Connexion8055